史上最详细!无人机航测仿地飞行教程——以大疆精灵4RTK为例 前言 受某位“无人机经常撞树”的读者所托,特地写了本期无人机仿地飞行的教程,希望能提供一定帮助。 ——什么是仿地飞行?仿地飞行,是指无人机在作业过程中,通过设定与已知三维地形的固定高度,使得飞机与目标地物保持恒定高差。借助仿地飞行功能,无人机系统能够适应不同的地形,根据测区地形自动生成变高航线,保持地面分辨率一致从而获取更好的数据效果。 ——为什么要仿地飞行?仿地飞行主要是应用在地形起伏较大的地方 测绘笔记 营地君 2022-01-23 458 热度 0评论
航测 | 半小时上手ContextCapture(航测版) 上一期中我们整理了关于Pix4Dmapper软件通俗易懂的操作流程: 航测 | 半小时学会Pix4Dmapper(航测版) 为什么本期的标题为“半小时上手”,而不是“半小时学会”呢,因为ContextCapture(俗称CC)这个软件比Pix4D功能更强大,自然需要更多的时间来熟悉和掌握,并且还有能够高效率处理大批量数据的“集群”功能,下一期咱们再讲。本期,为大家带来ContextC 测绘笔记 营地君 2021-03-11 650 热度 0评论
航测 | 利用ContextCapture集群功能,数倍提升建模效率! 上一期,我们讲述了如何快速上手Context Capture。 操作很简单,流程很容易走通,然而处理一次之后我们就会发现,建模效率太低了!四五百张的照片,重建的时候就需要切成几十个块,每个块处理1~2个小时,一个小小的项目,从头到尾就可能就需要一两天的时间来完成。 更何况,对于倾斜摄影,使用多镜头航拍建模来说,一两万张照片更是家常便饭! 本期,测绘营地就为大家详细讲述如何利用CC强大的集群功能来数 测绘笔记 营地君 2021-03-11 255 热度 0评论
航测 | 半小时学会Pix4Dmapper(航测版) 本期,为大家带来营地君整理的一套关于专业的无人机测绘和摄影测量软件——Pix4Dmapper的通俗易懂的操作流程。(该软件可在公众号菜单栏-下载中心获取,在软件教程网盘内,也有非常丰富的教程文档,大家可以自行阅读学习) 01 新建项目。定义项目名称及项目路径。 02 导入照片。选择照片所在路径导入,可同时选择多个文件夹。 03 图片属性。 图像坐标系默认和航飞原始数据的坐标系相同,为WGS84坐标 测绘笔记 营地君 2021-03-09 1044 热度 0评论
航测 | 关键点——相机检校参数的获取与优化 本期为大家详细讲解一下影响航测精度的关键所在——相机检校参数的获取与优化。 一、相机都有哪些参数 相机参数主要包含两类,内方位元素(内参数)与外方位元素(外参数)。 (1)内方位元素 描述摄影中心与像片之间相关位置的参数,与相机自身特性相关,包含: 1、摄影中心到像片的垂距(主距):fx,fy,一般情况取均值F=(fx+fy)/2 2、像主点在框标坐标系中的坐标(主点位 测绘笔记 营地君 2021-03-07 253 热度 0评论
航测 | 精灵4RTK如何做到免像控 01、为什么需要布设像控点 打个这样的比方,不知道是否恰当。把航拍照片比作一张张同样尺寸的A4纸,现在需要把所有的A4纸合并,拼成一张大纸,放置在一块水平的木板上。如何完美地拼接呢?我们需要把每张纸调整位置都水平地依次排列在木板上(解算并改正外方位元素,即POS信息),然后把每张纸都压得昝平(根据内方位元素进行畸变修正),为了没有拼接缝,需要把纸张之间相互重叠一部分(保证一定的重叠率),然后可能所 测绘笔记 营地君 2021-02-15 294 热度 0评论
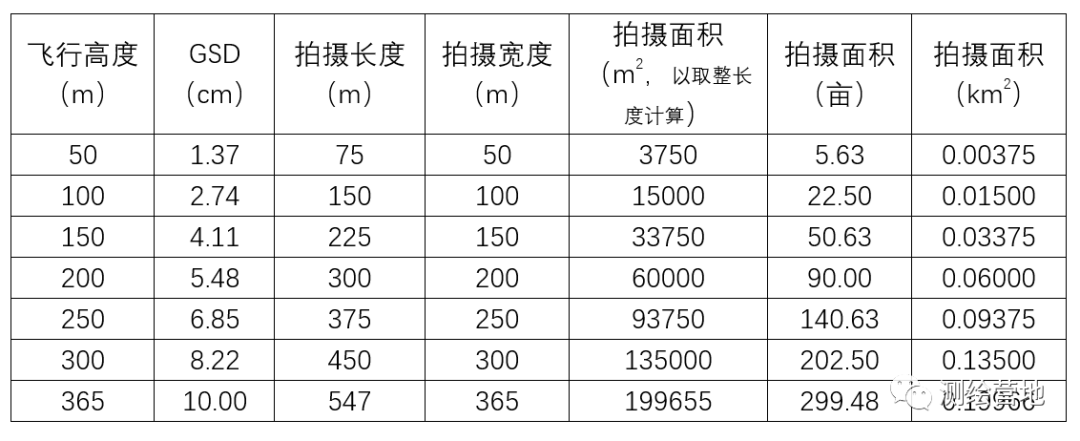
航测 | 如何计算大疆精灵4RTK照片拍摄的实际地面大小 首先,我们可以抽空了解几个相似的概念,避免相互混淆: (1)分辨率:是衡量遥感图像(或影像)能有差别地区分开两个相邻地物的最小距离的能力。 (2)空间分辨率,也称地面采样间隔(GSD,Ground Sample Distance):指数字影像中用地面距离单位表示的像素大小,即一个像素所代表的地面长度。如,某影像的地面采样间隔为5cm,即该影像一个像素所代表的地面长度为5cm。 (3)地面分辨率,也 测绘笔记 营地君 2021-01-15 529 热度 0评论